Powstał robot rozplątujący kable
Precyzyjny chwytak
Naukowcy z Massachusetts Institute of Technology (MIT) opracowali robotyczny chwytak o dużej zręczności. Potrafi on obsługiwać cienkie i elastyczne przedmioty, takie jak liny i kable. Rozplątywanie węzłów często stanowi nie lada wyzwanie dla człowieka, tym bardziej więc trudno umiejętności tej nauczyć robota. Badaczom udało się pokonać pierwsze bariery.
Dwa zręczne palce
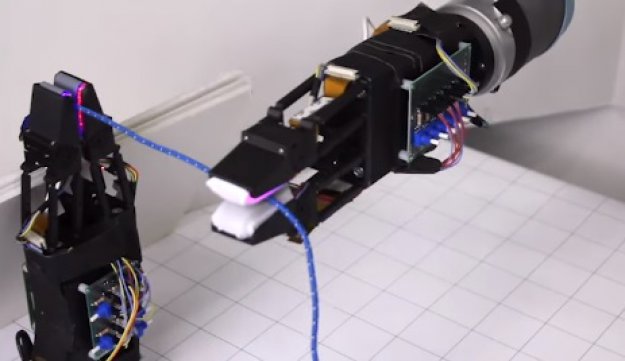
Naukowcy stworzyli konstrukcję z dwoma uchwytami, które mają przypominać ludzkie palce. Są one wyposażone w czujniki dotykowe zwane GelSight, wykonane z miękkiej gumy i wyposażone w kamery. Zamontowano je na ruchomym ramieniu robota. Ich zadaniem jest ocena pozycji kabla między palcami i pomiar sił tarcia podczas przesuwania się kabla. Te dwa kontrolery pracują równolegle: jeden moduluje siłę chwytania, a drugi dostosowuje pozycję chwytaka, aby utrzymać w nim kabel.
Jedną z zademonstrowanych umiejętności chwytaka było podłączenie kabla do gniazdka – tak jak robi to człowiek, wpinając np. słuchawki do telefonu komórkowego. Robot najpierw chwycił swobodnie unoszący się kabel, wsunął go sobie między palce, zatrzymał i przesunął, tak by dojść do wtyczki. Gdy ją poczuł, wyregulował pozycję wtyczki i włożył ją do gniazda.
Obiecująca przyszłość
Powstała konstrukcja nie potrafi jeszcze obsługiwać wszystkich kabli. Poprawa jego wydajności wymaga dostosowania kształtu czujnika GelSight umieszczonego w palcu. Badacze zauważyli bowiem, że gdy kabel dotarł do krawędzi palca, trudno było go wyjąć ze względu na wypukłą powierzchnię czujnika.
W przyszłości naukowcy planują nauczyć robota bardziej złożonych zadań manipulowania kablami, np. prowadzenia ich przez przeszkody. Wzorcem mają być czynności wykonywane przy kablach w przemyśle motoryzacyjnym.
Dopracowanie konstrukcji chwytaka mogłoby uczynić z niego użyteczną pomoc w wykonywaniu prac domowych, takich jak składanie ubrań, bądź też zadań technicznych, jak np. formowanie drutu czy szycie chirurgiczne.
Algorytmy robota można dostosować do kabli o różnych właściwościach fizycznych, takich jak materiał, sztywność i średnica, a także różnych prędkości pracy.
Pracę chwytaka można obejrzeć tutaj.
fot. YouTube/Shawn Wang



