Google uczy psa-robota za pomocą AI
Zajmowanie się zwierzętami często wymagają sporo energii, co może być trudne zwłaszcza dla osób starszych.
Pewną przewagę mają tu roboty - nie wymagają regularnych spacerów czy wizyt u weterynarza, a mogą stanowić namiastkę towarzysza.
Chodzenie? Nie tak proste
Naukowcy od lat starają się tworzyć zmechanizowane zwierzęta, które będą coraz bardziej przypominały te żywe. Najbardziej problematyczną kwestią jest zazwyczaj wiarygodna symulacja ruchu. Inżynierowie stają przed problemem, jak opisać algorytmami np. specyficzny chód psa, polegający na odbijaniu się łapami od ziemi, a wynikający z występowania u zwierzęcia dodatkowego, nieobecnego u ludzi stawu.
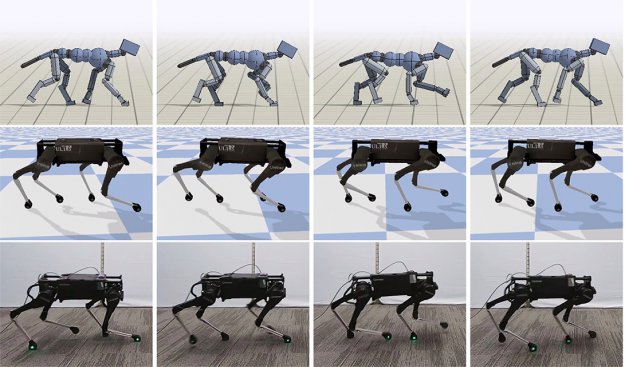
Ciekawe rozwiązanie tego problemu zaproponowali badacze z Google AI Labs, którzy do nauczenia swojego robota „psiego" chodu wykorzystali sztuczną inteligencję (AI). Badania są już prowadzone od dłuższego czasu, ale zespół zwlekał z publikacją ich rezultatów. Dzięki współpracy firmy z Uniwersytetem w Berkley udało się nauczyć robota wielu psich nawyków, takich jak spacerowanie, obrót czy przewracanie się z boku na bok. Urządzenie wykonuje przy tym ruchy analogiczne jak prawdziwe zwierzę.
Problem uproszczeń
Bez wykorzystania sztucznej inteligencji tak dokładne modelowanie psiego chodu byłoby trudne. Można co prawda wykorzystać techniki Mocap, ale ze względu na różnice w budowie zwierzęcia i modelu dokładne przeniesienie zachowania tego pierwszego najczęściej prowadzi do niestabilności robota i konieczności ręcznego dopasowania poszczególnych faz. Dodatkowym utrudnieniem jest fakt, że świat rzeczywisty nie jest idealną płaszczyzną 2D, jak w symulatorach komputerowych.

Nauka w praktyce
Problem ten rozwiązano jednak dzięki wykorzystaniu sztucznej inteligencji, która wnosi do symulacji trochę „kontrolowanego chaosu". Zastosowanie AI sprawia, że nie ma już konieczności śledzenia punktów kluczowych, takich jak stopy czy stawy zwierzęcia. W modelu matematycznym pojawiają się dodatkowe zmienne losowe, a zwiększenie masy robota i użycie słabszych silników powoduje powstawanie większej siły tarcia. Dzięki temu zmechanizowany pies jest bardziej świadomy podłoża i stopniowo – za pomocą uczenia maszynowego – przyswaja wiedzę o tym, jak przeciwdziałać dodatkowym utrudnieniom.
Opisane badania z pewnością wpłyną pozytywnie na wiarygodność psich robotów. Znacząco zwiększają one możliwości modelowania ruchu, jednocześnie mocno upraszczając cały proces. Autorzy projektu sami przyznają jednak, że wymaga on dalszego dopracowywania. Celem naukowców jest stworzenie systemów pozwalających maszynom na całkowicie autonomiczne wypracowywanie własnych sposobów poruszania się. Ciekawe, dokąd wtedy zaprowadzą je ich własne nogi...
fot. Google



