Pierwsze samoprowadzące się samochody powstały dawno temu. Do kierowania służył przewód wbudowany w ulicę, nad którym pojazd musiał się poruszać. Ten pomysł ze względu na kosmiczne koszty nie mógł zostać powszechnie wprowadzony. Dzisiaj jest prawie gotowe inne rozwiązanie.
Kierowca wzorem
Rzeczywiste kierowanie autem polega na rejestracji sygnałów o tym, co się dzieje wokół pojazdu (np. zapalających się światłach stopu, samochodach zmieniających pas ruchu, przechodniach przechodzących przez ulicę) i wykorzystywaniu ich do podejmowania decyzji. To samo robi nowoczesny samobieżny samochód. Używając swoich czujników, śledzi jednocześnie setki obiektów znajdujących się wokół pojazdu w polu 360 stopni. Pod tym względem przewyższa człowieka, który ma kąt widzenia jedynie około 120 stopni i może skupić uwagę tylko na jednym obiekcie.
Oczy i uszy
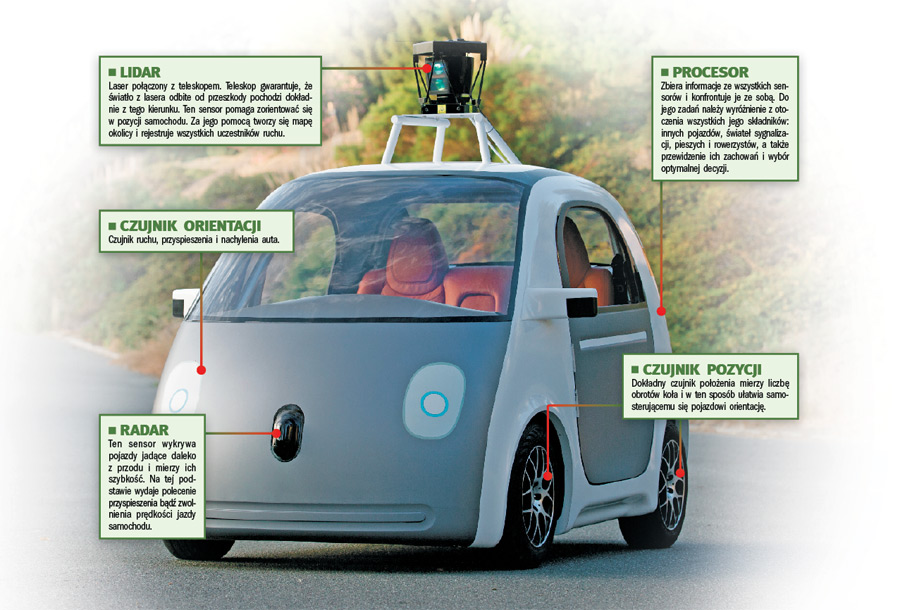
Samoprowadzące się auto ma kilka czujników. Laser połączony z teleskopem (to urządzenie nazywa się lidar) zastępuje oczy kierowcy. Dane z lidaru służą do sporządzenia mapy okolicy z udziałem wszystkich uczestników ruchu. Kolejnym sensorem jest GPS, ale ze względu na swoją słabą dokładność służy tylko do określenia przybliżonego położenia pojazdu. Wbudowany radar wyszukuje samochody jadące z przodu, mierzy ich szybkość i pilnuje, żeby zwolnić albo przyspieszyć, stosownie do sytuacji na drodze. Dokładny przebieg mierzy licznik obrotów jednego z kół. Oprócz tych czujników jest jeszcze sensor orientacji. Wszystkie czujniki są podłączone do komputera.
Różne sygnały pochodzące z teleskopowego czujnika lidaru są interpretowane jako sylwetki pieszych, rowerzystów, ulicznych sygnalizatorów, innych samochodów itd. Komputer stara się nie tylko zarejestrować, ale i przewidzieć ich pozycję w najbliższym czasie. Do tego wykorzystano sztuczną inteligencję: system zapisuje zachowania w podobnych sytuacjach i na podstawie prawdopodobieństwa wybiera najbardziej możliwą prognozę tego, co się wydarzy.
Na przykład komputer na podstawie położenia, trajektorii ruchu i prędkości pieszego może przewidzieć, że przejdzie on przez ulicę, nie zatrzymując się przy krawężniku. Wtedy następuje korekta trajektorii i zmniejszenie prędkości pojazdu. To przyhamowanie upewnia pieszego, że będzie mógł bezpiecznie przejść na drugą stronę.
Wielkie wyścigi
Szczegółowe rozwiązania, o których piszemy, dotyczą samochodu rozwijanego przez Google. To oczywiście nie jest jedyna taka konstrukcja. Prawdziwą wylęgarnią rozwiązań są zawody samobieżnych samochodów organizowane przez Agencję Ministerstwa Obrony USA (DARPA). Pierwszy wyścig w roku 2004 nie był udany, ale już w drugim zwycięzca dojechał do mety oddalonej o 200 km w ciągu siedmiu godzin. Najlepszym pojazdem okazał się volkswagen przerobiony na Uniwersytecie Stanforda pod kierunkiem Sebastiana Thruna. Następny wyścig, w roku 2007, przebiegał już na trudniejszej dla samoprowadzącego się auta trasie poprzecinanej ulicami, przypominającej środowisko miejskie. Uniwersytet Stanford i Thrun zajęli miejsce drugie. W roku 2009 szef zespołu i kilku jego byłych studentów rozpoczęli współpracę z Google. Następne wyścigi DARPA rozegrały się w latach 2012 oraz 2013.